

 资料下载
资料下载
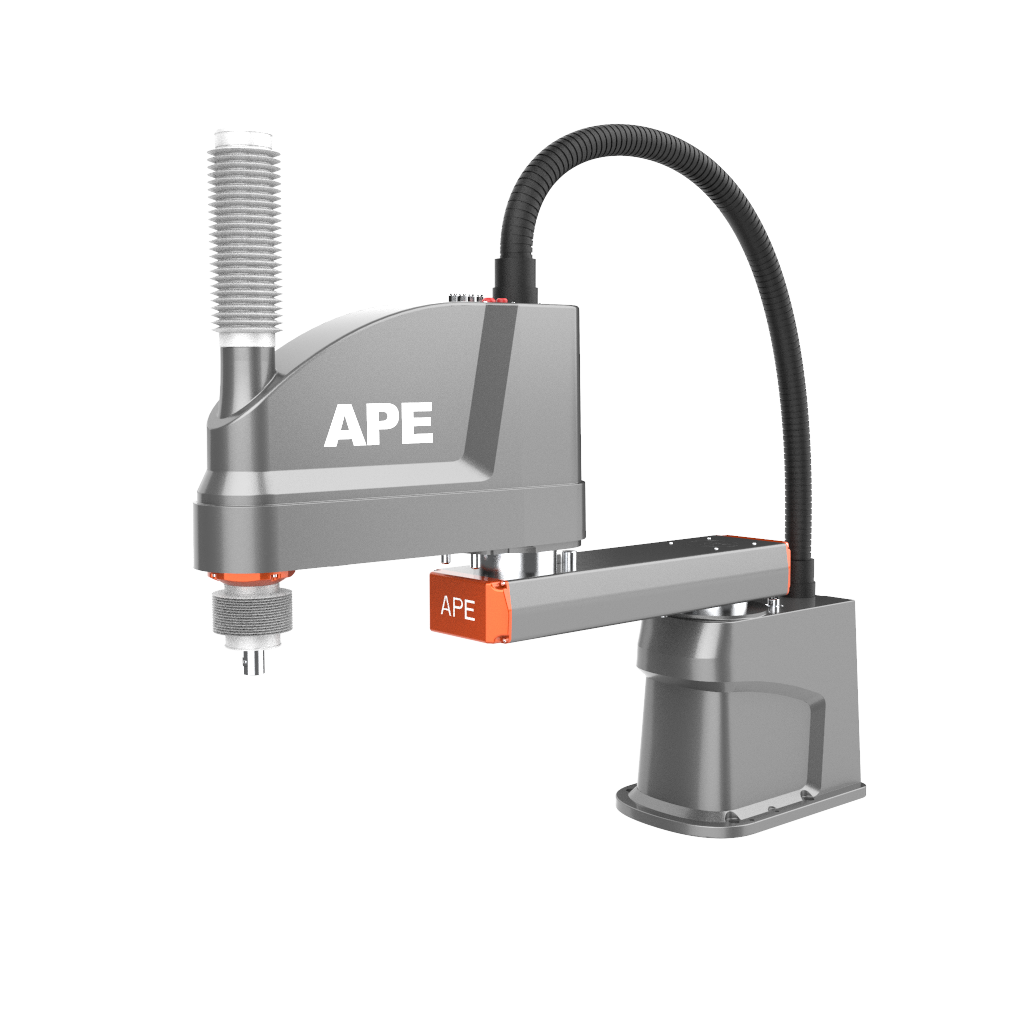
Product Detail

High rigidity low inertia small envelope:Through the optimization of the robot arm topology, the high rigidity and low inertia arm body is realized. The horizontal cabling method greatly reduces the space of the robot envelope and facilitates the customer system layout and use.

Beautiful shape:Robot body with a screw-free design concept, with beautiful streamlined shape, shaping the industrial works of art.

Selection covers a wide range:400mm and 600mm wingspan two flagship product, and can choose 300mm, 500mm, 700mm range, support customization.
| Items | ST20-4080(ST80) | |
| Installation | Desktop | |
| Configuration | Horizontal multi-joint type | |
| Degree of freedom | 4 | |
| Drive motor | AC servo motor | |
| Encoder type | Absolute type encoder | |
| Load | Rating | 10Kg |
| Maximum | 20Kg | |
| Allowable inertia torque of the fourth joint | Rating | 0.05Kg.㎡ |
| Maximum | 0.25Kg.㎡ | |
| Max. down force of J3 | 250N | |
| Power of each motion axis | Joint #1 | 750W |
| Joint #2 | 600W | |
| Joint #3 | 400W | |
| Joint #4 | 200W | |
| Arm length | Big arm | 400mm |
| Second arm | 400mm | |
| Max. radius | 800mm | |
| Working space | Joint #1 | ±148° |
| Joint #2 | ±153° | |
| Joint #3 | 150/390mm(IP65) 180/420mm(IP20) | |
| Joint #4 | ±360° | |
| Max. speed | Joint #1 | 267°/s |
| Joint #2 | 529°/s | |
| Joint #3 | 1250mm/s | |
| Joint #4 | 1714 °/s | |
| Standard cycle time | 0.388s | |
| Repeatability positioning accuracy | Joint #1+Joint #2 | ±0.02mm |
| Joint #3 | ±0.01mm | |
| Joint #4 | ±0.01° | |
| Body weight (without cables) | 49Kg(IP20)/51Kg(IP65) | |
| Subscriber circuit | 15 Pin 9Pin | |
| Subscriber gas circuit | ф4mmx2,ф6mmx2 | |
| Environmental specification | Standard:IP20 / Optional:IP65 | |